Marcelo Jacinto
PhD Candidate @ Institute for Systems and Robotics (ISR)
Instituto Superior Técnico, Lisbon, Portugal
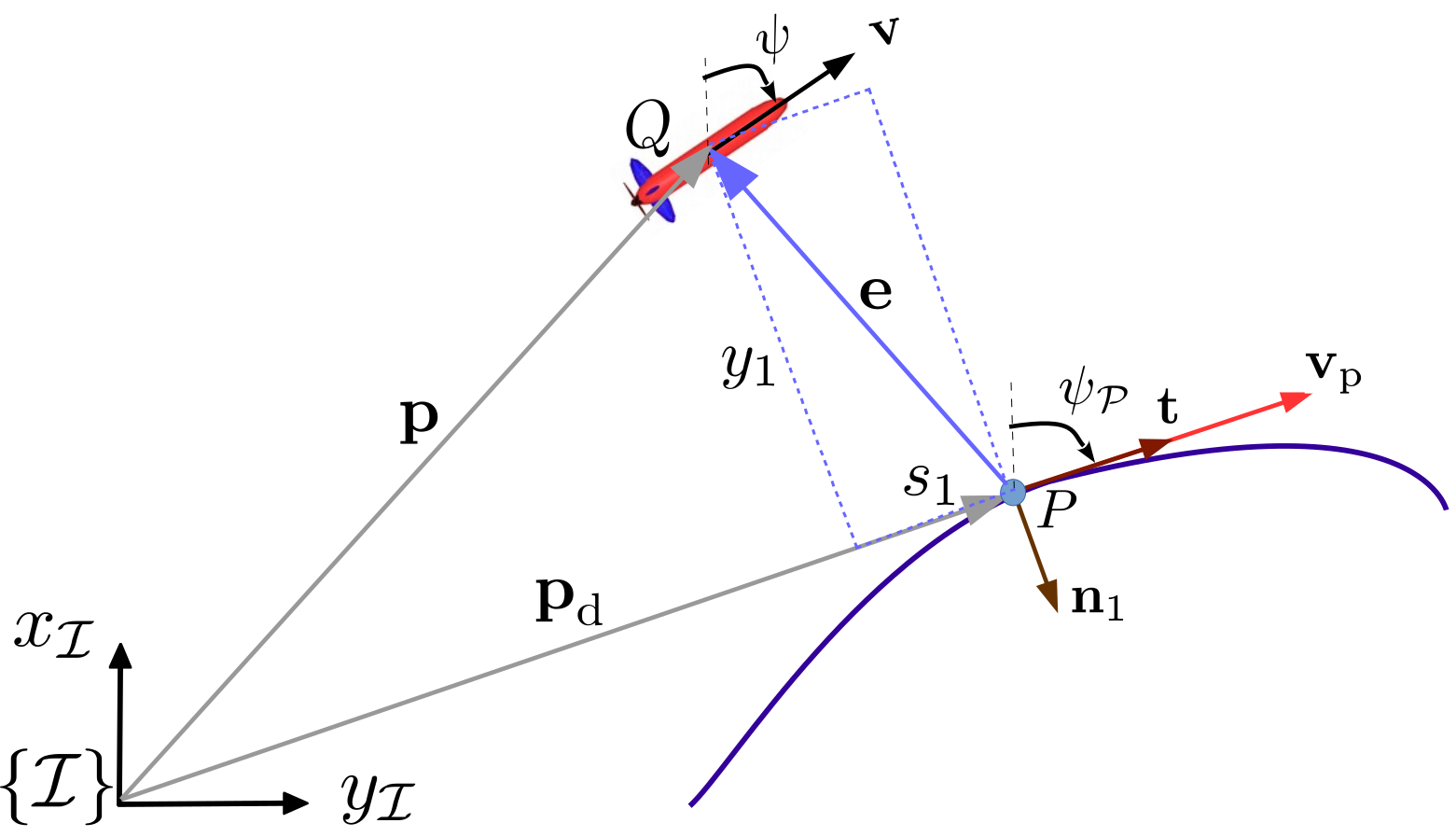
I am a PhD candidate at the Dynamical Systems and Ocean Robotics (DSOR) group in ISR/IST, under the supervision of Prof. Rita Cunha. My current research focuses on the intersection of vision-aided estimation, control and motion planning for target tracking.
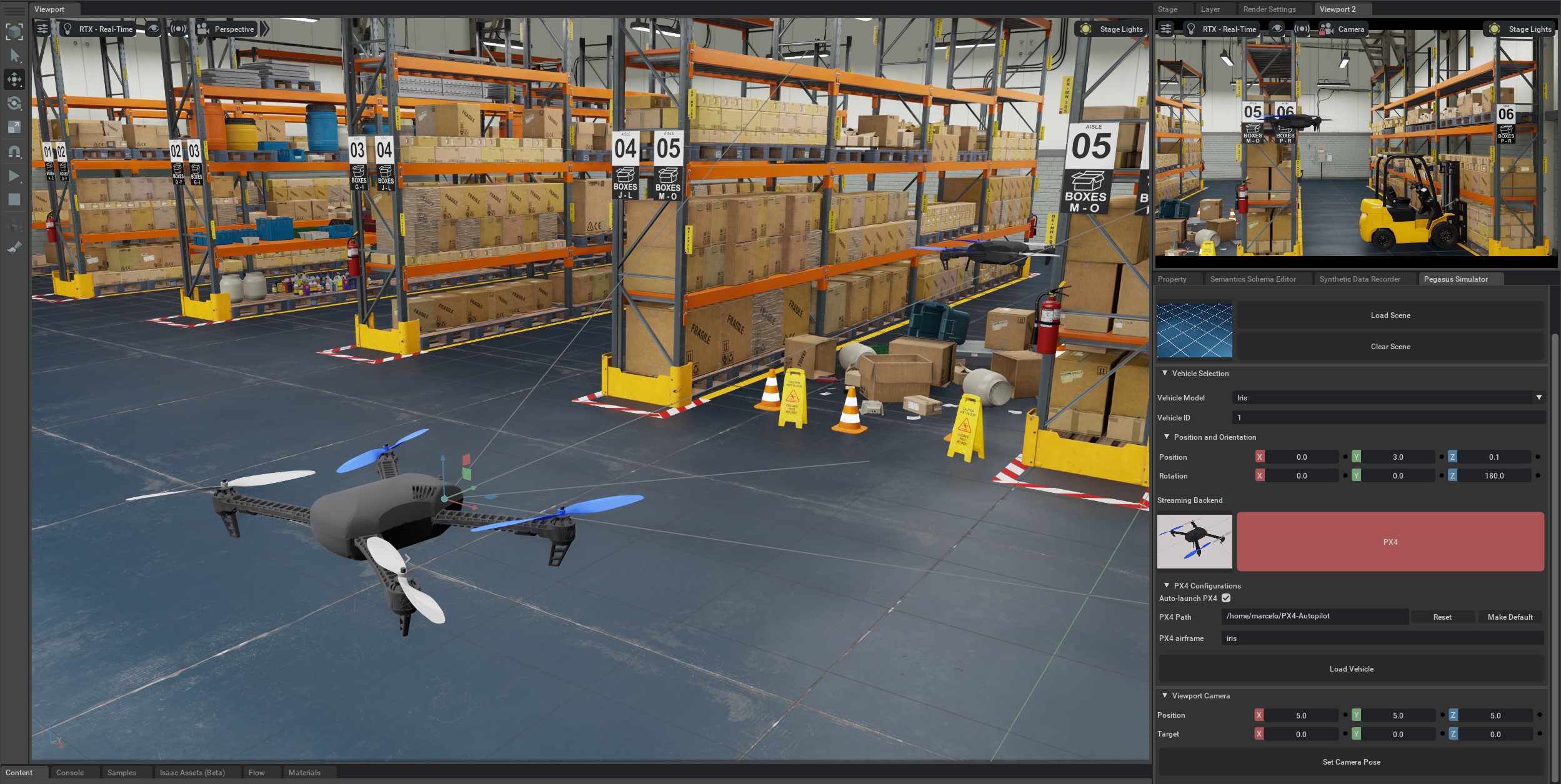
I am also the developer of Pegasus Simulator and the Pegasus GNC projects. Previously, I worked as an R&D engineer at DSOR/ISR on the MEDUSA class of marine vehicles and the EU BlueRoSES project under the supervision of Prof. António Pascoal.
Languages
Python
C
C++
MATLAB & Simulink
Robotics
ROS / ROS2
PX4
Gazebo
Isaac Sim
Jetson Jetpack
CAD (Onshape)
Vision + ML + Optimization
OpenCV
PyTorch
CasADi
CVXPY
Eigen (C++)
Tools
Docker
CMake
Git
Bash